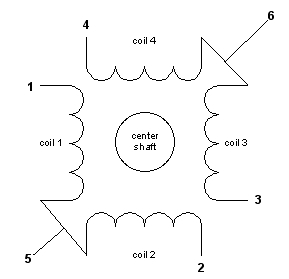
A stepper motor is a motor controlled by a series of electromagnetic coils. The center shaft has a series of magnets mounted on it, and the coils surrounding the shaft are alternately given current or not, creating magnetic fields which repulse or attract the magnets on the shaft, causing the motor to rotate.
This design allows for very precise control of the motor: by proper pulsing, it can be turned in very accurate steps of set degree increments (for example, two-degree increments, half-degree increments, etc.). They are used in printers, disk drives, and other devices where precise positioning of the motor is necessary.
There are two basic types of stepper motors, unipolar steppers and bipolar steppers.
Unipolar Stepper Motors
The unipolar stepper motor has five or six wires and four coils (actually two coils divided by center connections on each coil). The center connections of the coils are tied together and used as the power connection. They are called unipolar steppers because power always comes in on this one pole.
Bipolar stepper motors
The bipolar stepper motor usually has four wires coming out of it. Unlike unipolar steppers, bipolar steppers have no common center connection. They have two independent sets of coils instead. You can distinguish them from unipolar steppers by measuring the resistance between the wires. You should find two pairs of wires with equal resistance. If you’ve got the leads of your meter connected to two wires that are not connected (i.e. not attached to the same coil), you should see infinite resistance (or no continuity).
Like other motors, stepper motors require more power than a microcontroller can give them, so you’ll need a separate power supply for it. Ideally you’ll know the voltage from the manufacturer, but if not, get a variable DC power supply, apply the minimum voltage (hopefully 3V or so), apply voltage across two wires of a coil (e.g. 1 to 2 or 3 to 4) and slowly raise the voltage until the motor is difficult to turn. It is possible to damage a motor this way, so don’t go too far. Typical voltages for a stepper might be 5V, 9V, 12V, 24V. Higher than 24V is less common for small steppers, and frankly, above that level it’s best not to guess.
To control the stepper, apply voltage to each of the coils in a specific sequence. The sequence would go like this:
| Step | wire 1 | wire 2 | wire 3 | wire 4 |
| 1 | High | low | high | low |
| 2 | low | high | high | low |
| 3 | low | high | low | high |
| 4 | high | low | low | high |
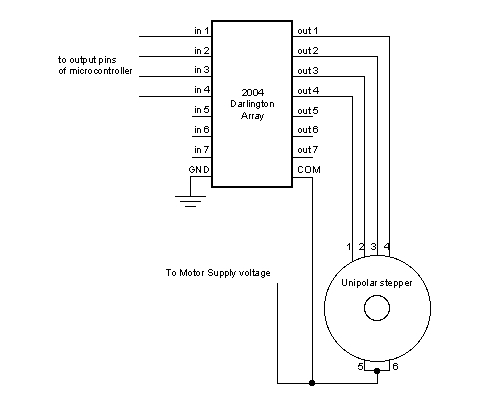
To control a unipolar stepper, you use a Darlington Transistor Array. The stepping sequence is as shown above. Wires 5 and 6 are wired to the supply voltage.
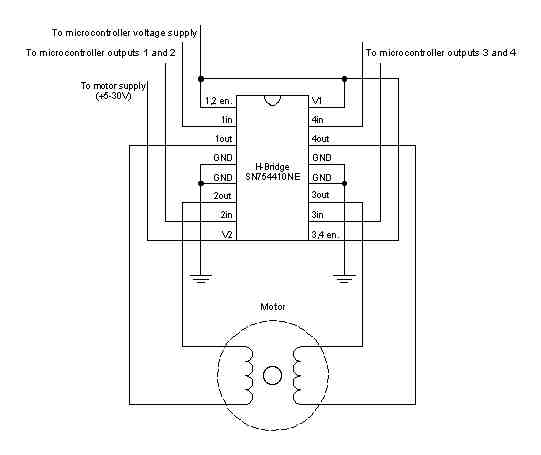
To control a bipolar stepper motor, you give the coils current using to the same steps as for a unipolar stepper motor. However, instead of using four coils, you use the both poles of the two coils, and reverse the polarity of the current.
The easiest way to reverse the polarity in the coils is to use a pair of H-bridges. The L293D dual H-bridge has two H-bridges in the chip, so it will work nicely for this purpose.
Once you have the motor stepping in one direction, stepping in the other direction is simply a matter of doing the steps in reverse order.
Knowing the position is a matter of knowing how many degrees per step, and counting the steps and multiplying by that many degrees. So for examples, if you have a 1.8-degree stepper, and it’s turned 200 steps, then it’s turned 1.8 x 200 degrees, or 360 degrees, or one full revolution.
Two-Wire Control
Thanks to Sebastian Gassner for ideas on how to do this.
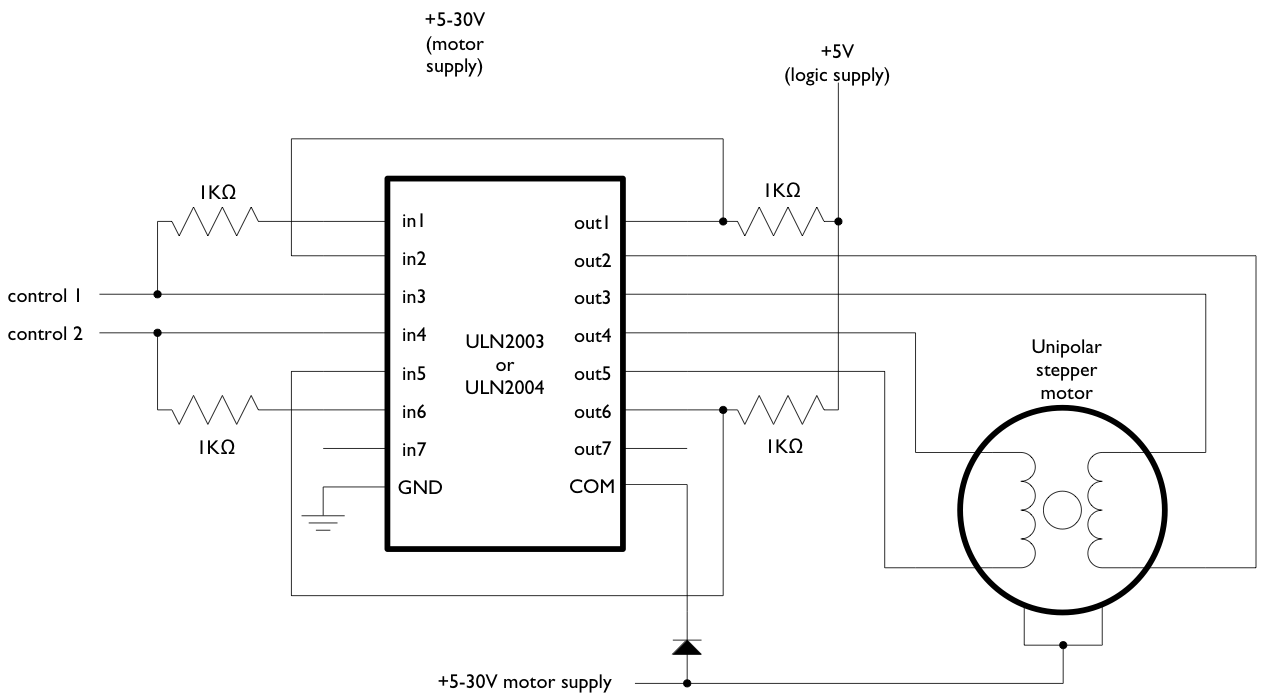
In every step of the sequence, two wires are always set to opposite polarities. Because of this, it’s possible to control steppers with only two wires instead of four, with a slightly more complex circuit. The stepping sequence is the same as it is for the two middle wires of the sequence above:
| Step | wire 1 | wire 2 |
| 1 | low | high |
| 2 | high | high |
| 3 | high | low |
| 4 | low | low |
The circuits for two-wire stepping are as follows:
Unipolar stepper two-wire circuit:
Biolar stepper two-wire circuit:
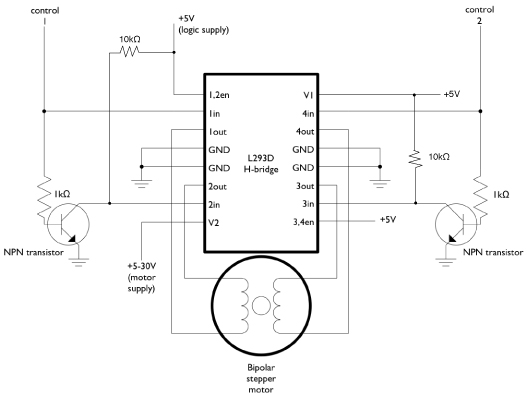
Programming the Microcontroller to Control a Stepper
Because both unipolar and bipolar stepper motors are controlled by the same stepping sequence, we can use the same microcontroller code to control either one. In the code examples below, connect either the Darlington transistor array (for unipolar steppers) or the dual H-bridge (for bipolar steppers) to the pins of your microcontroller as described in each example. There is a switch attached to the microcontroller as well. When the switch is high, the motor turns one direction. When it’s low, it turns the other direction.
The examples below use the 4-wire stepping sequence. A two-wire control program is shown for the Wiring/Arduino Stepper library only.
Wire pins 9-12 of the BX-24 to inputs 1-4 of the Darlington transistor array, respectively. If you’re using the PicBasic Pro code, it’s designed for a PIC 40-pin PIC such as the 16F877 or 18F452. Use pins PORTD.0 through PORTD.3, respectively. If you’re using a smaller PIC, you can swap ports, as long as you use the first four pins of the port.
Note that the wires read from left to right. Their numbers don’t correspond with the bit positions. For example, PORTD.3 would be wire 1, PORTD.2 would be wire 2, PORTD.1 would be wire 3, and PORTD.0 would be wire 4. On the BX-24, pin 9 is wire 1, pin 10 is wire 2, and so forth.
BX-24 code:
dim motorStep(1 to 4) as byte
dim thisStep as integer
Sub main()
call delay(0.5) ' start program with a half-second delay
dim i as integer
' save values for the 4 possible states of the stepper motor leads
' in a 4-byte array. the stepMotor routine will step through
' these four states to move the motor. This is a way to set the
' value on four pins at once. The eight pins 5 through 12 are
' represented in memory as a byte called register.portc. We will set
' register.portc to each of the values of the array in order to set
' pins 9,10,11, and 12 at once with each step.
motorStep(0) = bx0000_1010
motorStep(1) = bx0000_0110
motorStep(2) = bx0000_0101
motorStep(3) = bx0000_1001
' set the last 4 pins of port C to output:
register.ddrc = bx0000_1111
' set all the pins of port C low:
register.portc = bx0000_0000
do
' move motor forward 100 steps.
' note: by doing a modulo operation on i (i mod 4),
' we can let i go as high as we want, and thisStep
' will equal 0,1,2,3,0,1,2,3, etc. until the end
' of the for-next loop.
for i = 1 to 100
thisStep = i mod 4
call stepMotor(thisStep)
next
' move motor backward
for i = 100 to 1 step -1
thisStep = i mod 4
call stepMotor(thisStep)
next
loop
End Sub
sub stepMotor(byref whatStep as integer)
' sets the value of the eight pins of port c to whatStep
register.portc = motorStep(whatStep)
call delay (0.1) ' vary this delay as needed to make your stepper step.
end sub
PicBasic Pro code:
start:
High PORTB.0
' set variables:
x VAR BYTE
steps VAR WORD
stepArray VAR BYTE(4)
clear
TRISD = %11110000
PORTD = 255
input portb.4
Pause 1000
stepArray[0] = %00001010
stepArray[1] = %00000110
stepArray[2] =%00000101
stepArray[3] = %00001001
main:
if portb.4 = 1 then
steps = steps + 1
else
steps = steps - 1
endif
portD = stepArray[steps //4]
pause 2
GoTo main
pBasic (Basic Stamp 2) code:
' set variables:
x var byte
stepper var nib
steps var word
' set pins 8 - 10 as outputs, using DIRS to do so:
dirs.highbyte = %00001111
main:
steps = 200
gosub clockStep
pause 1000
gosub counterClockStep
pause 1000
goto main
clockStep:
debug "counter" , cr
for x = 0 to steps
lookup x//4, [%1010,%1001,%0101,%0110], stepper
outs.highbyte.lownib = stepper
pause 2
next
return
counterclockStep:
debug "clockwise", cr
for x = 0 to steps
lookup x//4, [%0110,%0101,%1001,%1010], stepper
outs.highbyte.lownib = stepper
pause 2
next
return
Wiring Code (for Arduino board):
This example uses the Stepper library for Wiring/Arduino. It was tested using the 2-wire circuit. To change to the 4-wire circuit, just add two more motor pins, and change the line that initalizes the Stepper library like so:
Stepper myStepper(motorSteps, motorPin1,motorPin2,motorPin3,motorPin4);
/*
Stepper Motor Controller
language: Wiring/Arduino
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 and 9 of the Arduino.
The motor moves 100 steps in one direction, then 100 in the other.
Created 11 Mar. 2007
Modified 7 Apr. 2007
by Tom Igoe
*/
// define the pins that the motor is attached to. You can use
// any digital I/O pins.
#include <Stepper.h>
#define motorSteps 200 // change this depending on the number of steps
// per revolution of your motor
#define motorPin1 8
#define motorPin2 9
#define ledPin 13
// initialize of the Stepper library:
Stepper myStepper(motorSteps, motorPin1,motorPin2);
void setup() {
// set the motor speed at 60 RPMS:
myStepper.setSpeed(60);
// Initialize the Serial port:
Serial.begin(9600);
// set up the LED pin:
pinMode(ledPin, OUTPUT);
// blink the LED:
blink(3);
}
void loop() {
// Step forward 100 steps:
Serial.println("Forward");
myStepper.step(100);
delay(500);
// Step backward 100 steps:
Serial.println("Backward");
myStepper.step(-100);
delay(500);
}
// Blink the reset LED:
void blink(int howManyTimes) {
int i;
for (i=0; i< howManyTimes; i++) {
digitalWrite(ledPin, HIGH);
delay(200);
digitalWrite(ledPin, LOW);
delay(200);
}
}
For more on steppers, see the DC motor notes on this site.
9 Replies to “Stepper Motors”
Comments are closed.